










1 μC/OS-Ⅱ的工作原理
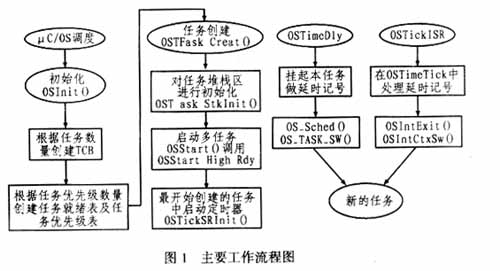
μC/OS-Ⅱ是一個源碼公開的實時多任務操作系統,其工作流程如圖1所示。圖中,任務切換的核心是利用出棧指令將各個任務的工作現場再現,并利用子程序返回指令改變PC指針以完成任務的切換。移植的關鍵是如何構造任務堆棧及任務切換時的出棧順序。任務區堆棧初始化主要是模擬任務被中斷后的堆棧內容。
2 80196KC的工作狀態
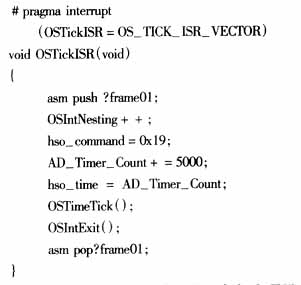
8 0196KC是Intel公司的16位單 片機,和程序運行密切相關的寄存器有指令計數器PC、堆棧指針sp、程序狀態寄存器PSW、中斷屏蔽寄存器INTMASK和INTMASK1以及窗口寄存器WSR(以下將程序狀態寄存器PSW、中斷屏蔽寄存器INTMASK和INTMASK1、窗口寄存器WSR統稱為程序狀態字)。它們可在執行子程序調用call指令時自動將pc進棧,并在子程序返回調用RET指令時自動將pc出棧。由于80196KC有16位的尋址能力,故這一動作有2個字節進(出)棧,其中push a指令將程序狀態字進棧,pop a指令將程序狀態字出棧。這一動作共有4個字節進(出)棧。另外push a動作會將PSW中的中斷允許位清零,故通常用push a關閉中斷,而用pop a恢復中斷允許。由于80196KC的時鐘節拍是特定的周期性中斷,當每個時鐘節拍到來時,系統將對任務延時做一次裁決。因此,在這個時鐘節拍可采用80196KC中的軟件定時器中斷。
3 Taskingc編譯器的工作細節
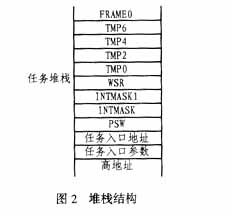
帶參數的函數調用編譯后的主要操作是先將參數進棧,然后執行call指令。在函數入口處將堆棧中的參數倒入寄存器tmp0、tmp2、tmp4和tmp6以進行操作(以下稱臨時寄存器)的原因主要是,堆棧一般位于RAM區,而對RAM區操作不如對寄存器操作快。如果該函數有局部變量,局部變量也是分配在堆棧中。Tasking c編譯器一般用一寄存器frame01(以下稱框架寄存器)對局部變量進行訪問,在函數返回時執行ret操作,并對SP指針進行調整,以跳過函數參數在堆棧中的位置。中斷調用和函數調用類似,中斷本身雖沒有參數,但進中斷后要對臨時寄存器進行保護。因此,應在進中斷后執行push a操作,并在中斷返回時使臨時寄存器出棧(注意出棧順序),然后再次執行pop a和ret操作。圖2所示為堆棧區的一般結構。
4移植的細節
在OSTaskStkInit()中,任務堆棧區的構造特點是80196KC的堆棧區由高向低增長,處是任務的入口參數,接著是PC指針和程序狀態字。如前所述,任務切換時要對臨時寄存器和框架寄存器進行保護。明確了任務堆棧的構造后,編寫任務啟動函數(指OSStaart函數)和任務切換函數(指OS_TAASK_SW和OSIntCtxSw函數)的關鍵是,在得到了優先級的任務堆棧指針后,如何按正確的順序出棧,直到PC指針。其中OS_TASK_SW()函數在切換任務之前還要編寫對當前任務的現場進行保護的程序,而OSIntCtxSw()不用,因為中斷函數用C寫成,而OSIntCtxSw()是在中斷中調用的,因此,TaskingC編譯器在進中斷時已自動對其保護。同時還應注意,由于在中斷服務程序中沒有定義局部變量,這使得Tasking C編譯器不能對框架寄存器進行保護,因此,對這一寄存器的保護應在設計時自己加上。
還應注意,在其它中斷服務程序中,如果沒有定義局部變量,也應加上對框架寄存器的保護。如果有局部變量,編譯器會自動對框架寄存器進行保護。在編寫OSIntCtxSw()函數時應當注意,由于OS-IntCtxSw()是在OSIntExit()中調用的,且在調用OS-IntCtxSw()之前又有一個關中斷的操作。因此,筆者采用push a方式來關閉中斷,也就是說,切換到另一高優先級的任務后,會在當前任務中留下在OSIntC-txSw()和OSIntExit()調用的返回地址4個字節的垃圾和pusha關中斷時進棧的4個字節垃圾(共8個字節)。因此,為了保證下次切換到該任務的正確性,應將SP指針加8,然后再進行任務切換。為加深對此的理解,可以做一假設:如果80196KC是24位(3個字節)尋址能力,在當前任務中會留下OSIntCtxSw()和OSIntExit()調用的返回地址的6個字節的垃圾,如果關中斷直接采用asmdi方式,而不牽扯到堆棧操作,此時SP應調整6個字節而不是8個字節。
5正確性檢驗
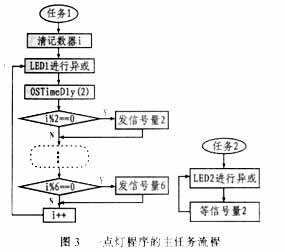
圖3是一個點燈程序的主任務流程。其6個燈中的每一個點燈操作都是一個單獨任務。個燈每兩個時鐘節拍做一次異或操作。如果LED1每執行2次異或操作向任務2發一信號量2,每執行3次異或操作向任務3發一信號量3,每執行4次異或操作向任務4發一信號量4,每執行5次異或操作向任務5發一信號量5,每執行6次異或操作向任務6發一信號量6。那么,任務2到任務6在接到相應的信號量時將對自已控制的燈進行一次異或操作。理論分析,LED2到LED6的波形周期分別為LED1的2到6倍。筆者曾用示波器對6個燈的波形進行觀察,其結果與理論分析相符,同時,在連續運行數天后,沒有發現死機和復位,證明移植成功。